-
salvo224

 .
.User deleted
Xchè da 5 e non 10k?  .
. -
.
5k basta ed avanza, da 10 sono più sensibili ma non così da percepirlo poi... . -
salvo224 .
User deleted
Cpt . -
Johnnyluna76 .
User deleted
Grazie ragazzi; qualcuno potrebbe farmi vedere come collegare i pot ai motori? . -
salvo224 .
User deleted
Ecco un esempio
O dovresti usare il sistema a glifo oscillanteAttached Image .
. -
salvo224 .
User deleted
Eccolo trovato Attached Image .
. -
.Grazie ragazzi; qualcuno potrebbe farmi vedere come collegare i pot ai motori?
HOW TO CONNECT A POTENTIOMETER. -
salvo224 .
User deleted
Doc mi manderesti lo schema collegamento pot alle jrk?grz . -
.
Ciao Salvo, questo è il jrk12v12 quando ti arriva con le saldature da fare

Questo è il JRK12v12 montato con i collegamenti da effettuare al potenziometro , ai motori, ed all' alimentazione.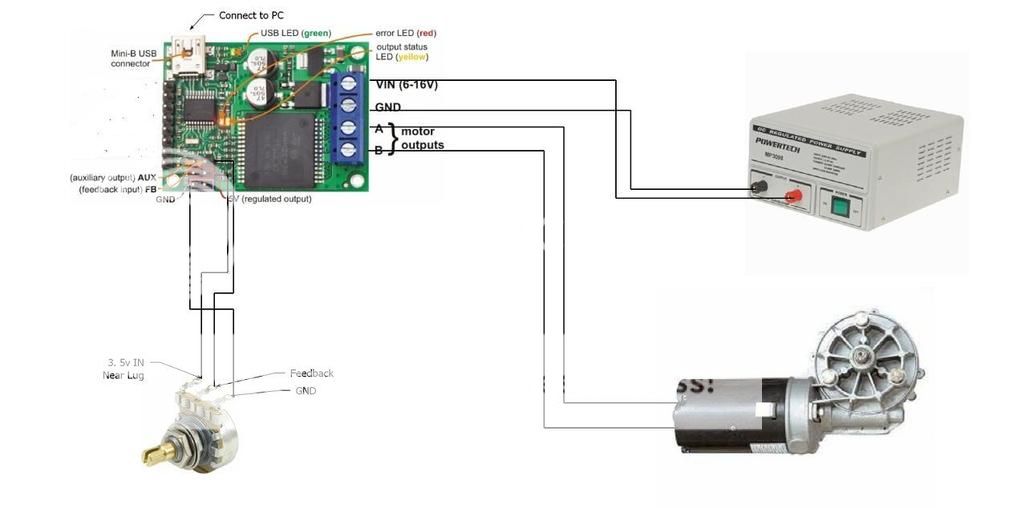
JRK12v12 to POT ELECTRIC SCHEME
Se non ti è chiaro qualcosa chiedi pure .
. -
salvo224 .
User deleted
Ciao doc parliamo qua così che a qualche altro utente pss essergli utile...
Intanto inizio dal dire che seguendo la procedura sl sito pololu il led rosso si era spento e ttt sembrava essere ok.girald manualmente il potenziometro il software leggeva i cambi se mettevo a sero era ok appena salivo mi dava errore feed disconnect portavo a zero cliccavo reset error ed era ok ma un errore persisteva il primo della lista errori sai aiutarmi?puoi consigliarmi dei pot decenti?
Poi x qnt riguarda la config base ne vorrei una x qnt riguarda le varie tab dl software grazie doc cn le screen sarà molto chiaro. -
salvo224 .
User deleted
Doc appena premo set targhet si scollega la scheda xchè? . -
.
non premere set target, la procedura è questa:
metti il potenziometro in posizione e fissalo a circa metà della sua corsa (hanno circa 270 gradi di rotazione) tu ne userai circa 40 in negativo e 40 in positivo, ma fai in modo che abbia margine e non arrivi a finecorsa o lo rompi, costano poco ma cambiarli e saldare ogni volta è una scocciatura.
POi passa al software jrk e prima cosa apri il tab input e setta il primo motore cliccando reset to full range, poi clicca LEARN e setta il valore minimo(omax li puoi poi invertire) clicca set e setta anche il valore opposto. dopodichè conferma con appli to the device.
prima di muovere a tutta potenza onde non fare danni setta a questi valori nel tab motor : set in max accell 100, max duty 100, max duty while feedback out of range 100, current calibration 130. questo farà muovere lentamente i motori e ti permetterà di stoppare prima di fare danni ai potenziometri.
a questo punto sei in grado di muovere la leva via software, la procedura di prova è questa.
spunta la casella "automatically set target" e poi muovi con il mouse la slide a destra e sinistra, vedrai la leva muoversi.
Nella tab Pid setta questi valori: prportional coefficient 4\4 , integral coefficient 0\3 , derivate coefficient 4\4 pid periods 20
integral limit 10000.
una volta che hai visto che la leva si muove in range puoi andare nel tab motor e portare i valori set in max accell 400, max duty 400, max duty while feedback out of range 400, current calibration 130
ripeti le stesse operazioni per entrambe le leve (pot).
è normale avere degli errori jrk, questi sono dati dagli sforzi dei motori, una quantità accettabile è tollerata se sono troppi significa che i motori non sono sufficientemente veloci\potenti.
Molto importante è il raffreddamento delle jrk, scaldano come matti provvedi a dissiparle a dovere o le fondi.
io ho messo un heatpipe e un ventolone su ricavando un minicase da un vecchio alimentatore.. -
salvo224 .
User deleted
Sn riuscito a fr muovere i motori nn manca ne potenza ne velocità li ho ftt muovere girando a mano i pot ma a volte la scheda si scollegava dal pc cs puó essere?ho ftt muovere sl un motore x provare riscalda un po' ora prendo dll head skin e gli metto su dll ventole 1 x scheda . -
.
Si scollega se c' è un corto ( se non hai saldato bene o isolato bene i connettori fanno microcontatti) o un surriscaldamento eccessivo. . -
salvo224 .
User deleted
Oggi li isolo cmq i connettori vanno saldati tutti qll in dotazione?qll nll parte sx dll scheda?(rx tx ecc) .
 Reparto Corse Sim Racing Team [Assetto Corsa - rFactor -rf2- Project Cars - MOD - Setup - Rally Dirt- volanti Fanatec - Logitech
Reparto Corse Sim Racing Team [Assetto Corsa - rFactor -rf2- Project Cars - MOD - Setup - Rally Dirt- volanti Fanatec - Logitech  Periferiche di gioco
Periferiche di gioco
Postazione dinamica MOTION 2DOF WowDOCwoW, autocostruita tipo ZALEM v25Foto, descrizione e progetti per costruire un supporto postazione Volante + Pedaliera |
 Web
Web